CloudCompare二次开发之如何通过PCL进行点云分割?_pointcloud2点云截取-程序员宅基地
技术标签: c++ CloudCompare
0.引言
因笔者课题涉及点云处理,需要通过PCL进行点云数据一系列处理分析,查阅现有网络资料,对常用PCL点云分割进行代码实现,本文记录分割实现过程。
1.CloudCompare界面设计配准(segment)按钮
(1)设计.ui文件
①设计按钮
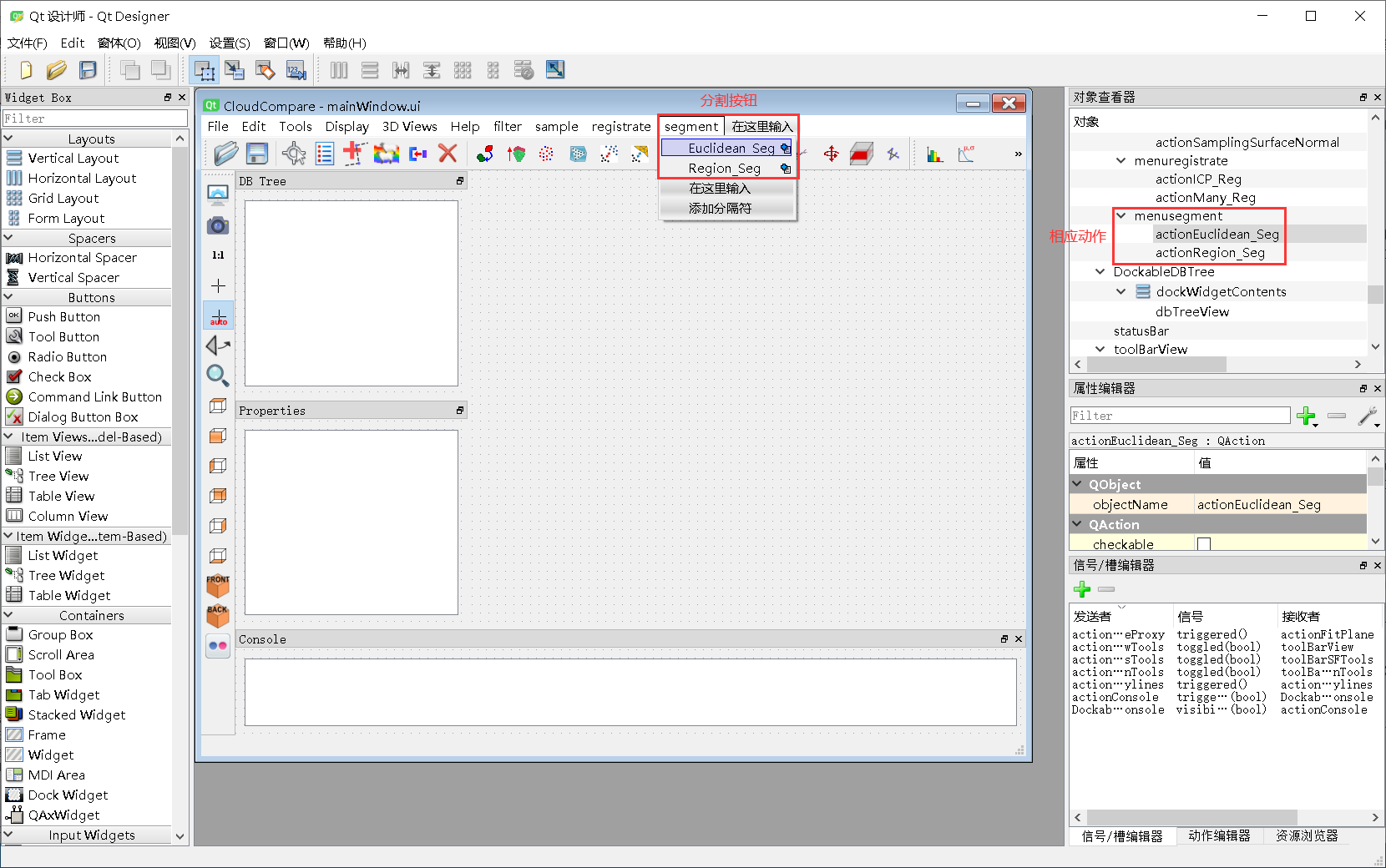
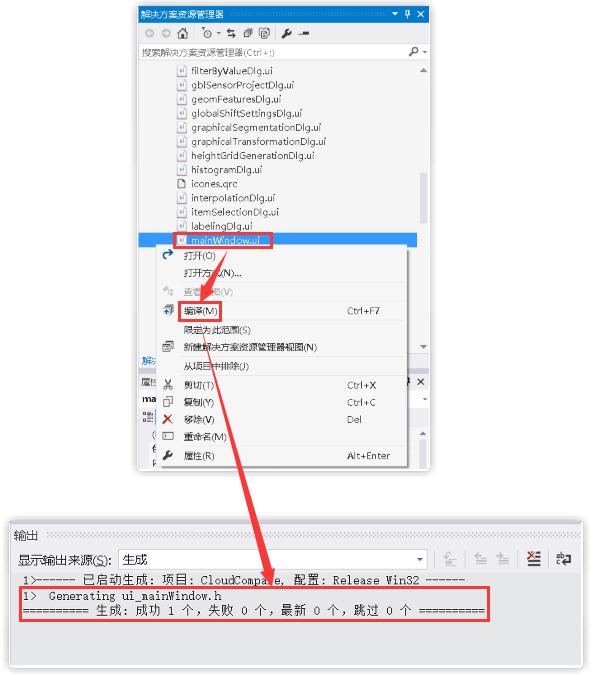
②编译.ui
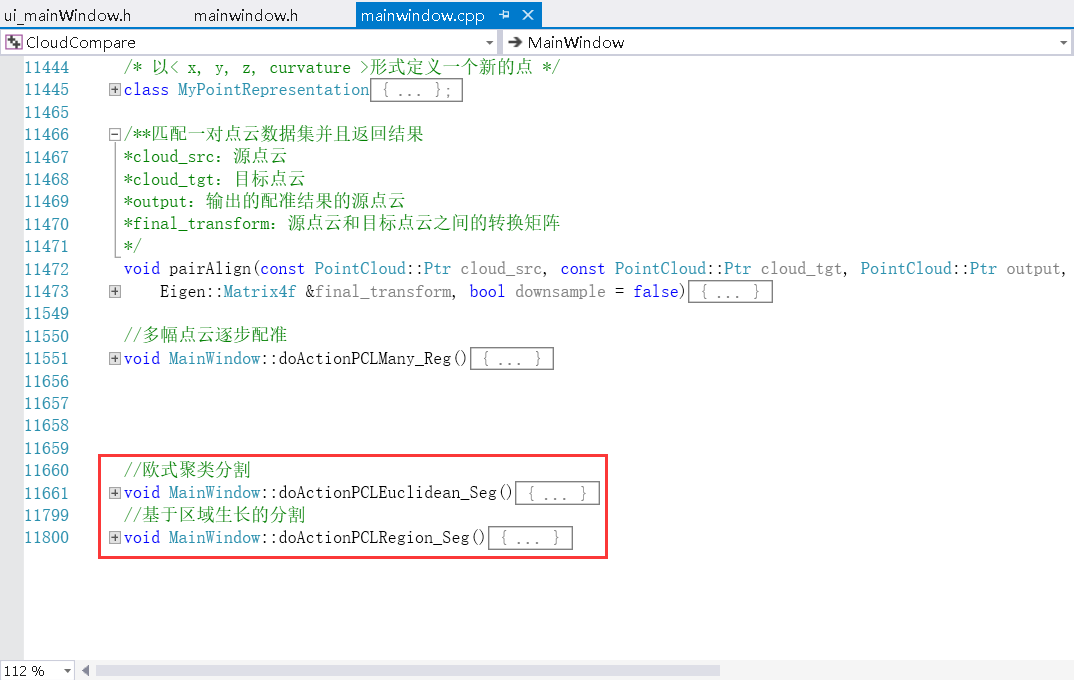
(2)修改mainwindow.h文件
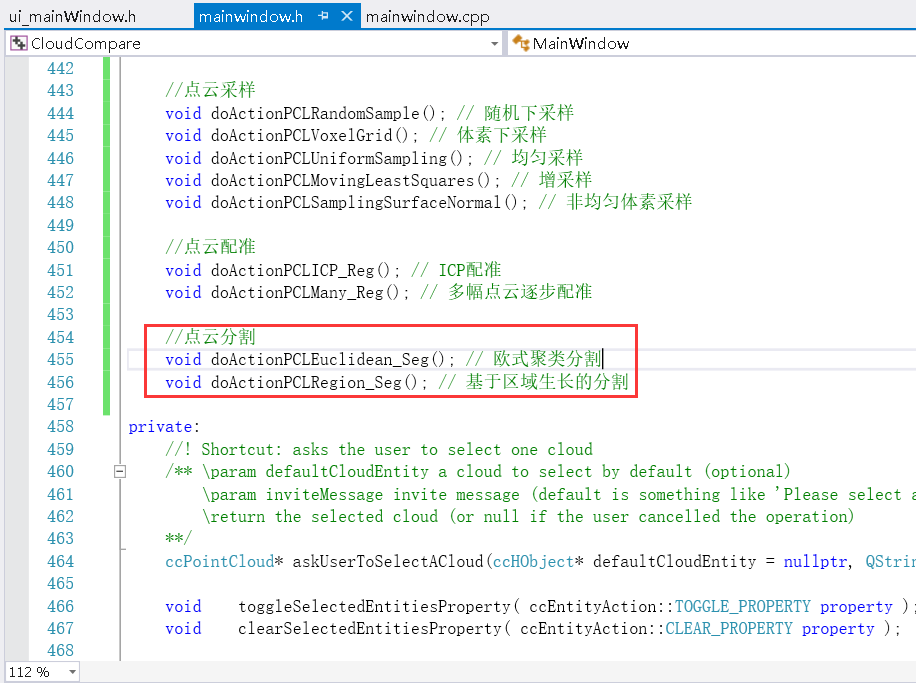
//点云分割
void doActionPCLEuclidean_Seg(); // 欧式聚类分割
void doActionPCLRegion_Seg(); // 基于区域生长的分割
(3)修改mainwindow.cpp文件
①添加头文件
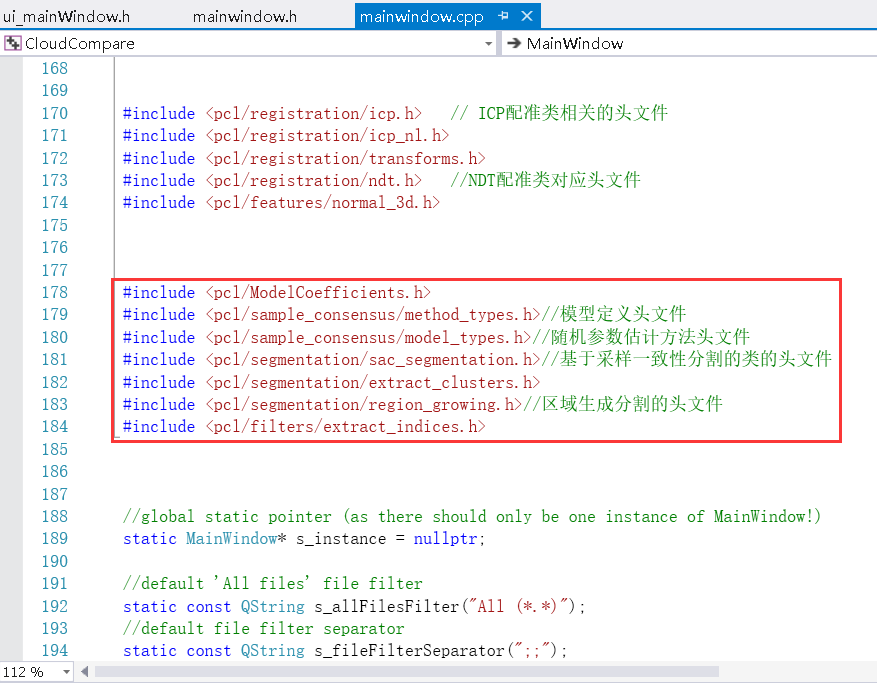
#include <pcl/ModelCoefficients.h>
#include <pcl/sample_consensus/method_types.h>//模型定义头文件
#include <pcl/sample_consensus/model_types.h>//随机参数估计方法头文件
#include <pcl/segmentation/sac_segmentation.h>//基于采样一致性分割的类的头文件
#include <pcl/segmentation/extract_clusters.h>
#include <pcl/segmentation/region_growing.h>//区域生成分割的头文件
#include <pcl/filters/extract_indices.h>
②添加实现代码
//欧式聚类分割
void MainWindow::doActionPCLEuclidean_Seg()
{
}
//基于区域生长的分割
void MainWindow::PCLRegion_Seg()
{
}
③添加信号槽函数
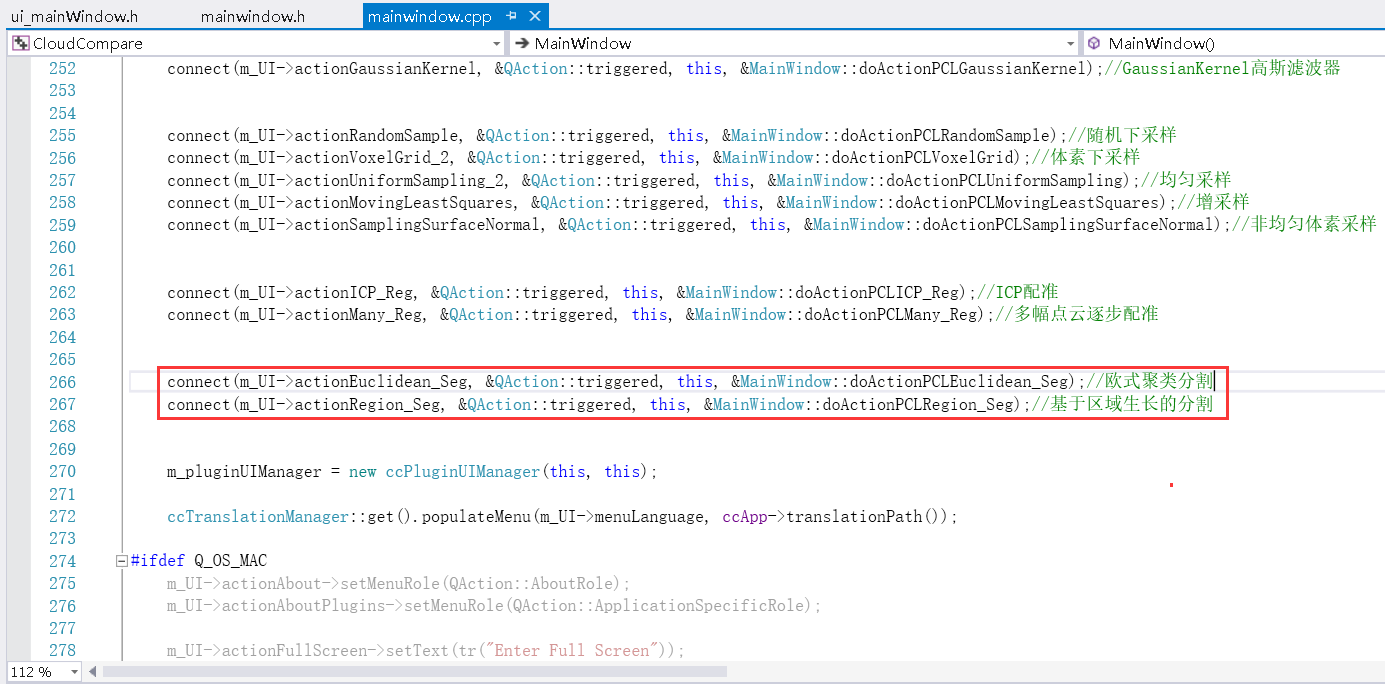
connect(m_UI->actionEuclidean_Seg, &QAction::triggered, this, &MainWindow::doActionPCLEuclidean_Seg);//欧式聚类分割
connect(m_UI->actionRegion_Seg, &QAction::triggered, this, &MainWindow::doActionPCLRegion_Seg);//基于区域生长的分割
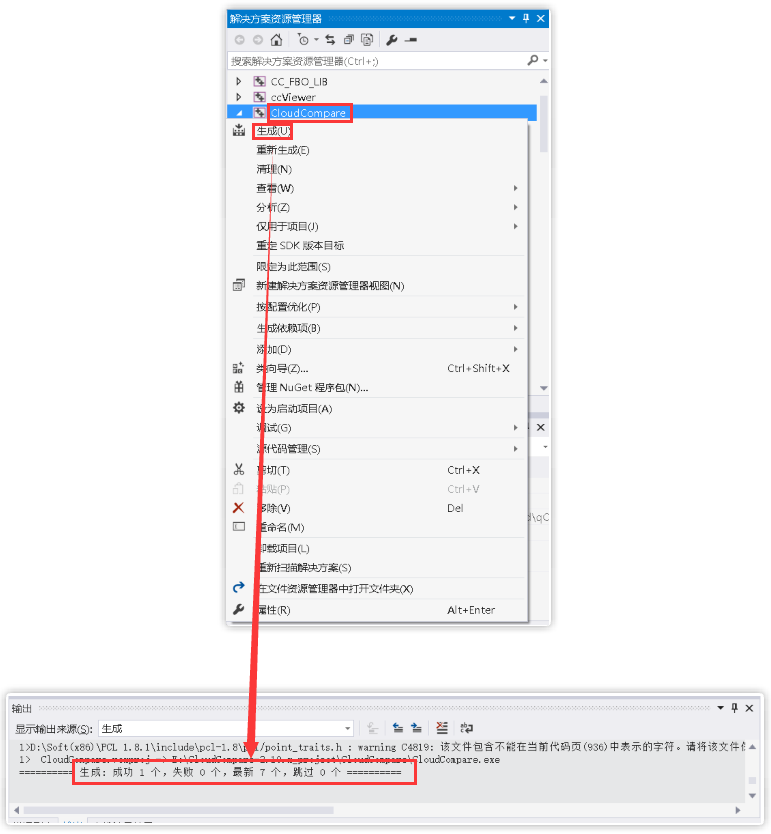
(4)生成
2.欧式聚类分割(Euclidean_Seg)
(1)实现代码
//欧式聚类分割
void MainWindow::doActionPCLEuclidean_Seg()
{
if (getSelectedEntities().size() != 1)
{
ccLog::Print(QStringLiteral("只能选择一个点云实体"));
return;
}
ccHObject* entity = getSelectedEntities()[0];
ccPointCloud* ccCloud = ccHObjectCaster::ToPointCloud(entity);
// ---------------------------读取数据到PCL----------------------------------
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
cloud->resize(ccCloud->size());
pcl::PointCloud<pcl::PointNormal>::Ptr incloud(new pcl::PointCloud <pcl::PointNormal>());
for (int i = 0; i < cloud->size(); ++i)
{
const CCVector3* point = ccCloud->getPoint(i);
cloud->points[i].x = point->x;
cloud->points[i].y = point->y;
cloud->points[i].z = point->z;
pcl::PointNormal pt;
pt.x = point->x;
pt.y = point->y;
pt.z = point->z;
incloud->points.push_back(pt);
}
pcl::VoxelGrid<pcl::PointXYZ> vg;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
vg.setInputCloud(cloud);
vg.setLeafSize(0.05f, 0.05f, 0.05f);
vg.filter(*cloud_filtered);
pcl::SACSegmentation<pcl::PointXYZ> seg;//实例化一个分割对象
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);//实例化一个索引
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);//实例化模型参数
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZ>());//提取到的平面保存至cloud_plane
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_f(new pcl::PointCloud<pcl::PointXYZ>());//提取到的平面保存至cloud_plane
//pcl::PCDWriter writer;
seg.setOptimizeCoefficients(true);//参数优化
seg.setModelType(pcl::SACMODEL_PLANE);//模型类型:平面
seg.setMethodType(pcl::SAC_RANSAC);//参数估计方法
seg.setMaxIterations(100);//最大迭代次数
seg.setDistanceThreshold(0.02);//设置内点到模型的距离允许最大值
//创建一个文件夹来放点云
ccHObject* CloudGroup = new ccHObject(QString("SegmentGroup"));
int i = 0, nr_points = (int)cloud_filtered->points.size();//计数变量i,记下提取的平面的个数
dispToConsole("cloud_filtered->points.size()1:" + QString::number(cloud_filtered->points.size()), ccMainAppInterface::STD_CONSOLE_MESSAGE);
while (cloud_filtered->points.size() > 0.3 * nr_points)
{
// Segment the largest planar component from the remaining cloud
seg.setInputCloud(cloud_filtered);//设置要分割的点云
seg.segment(*inliers, *coefficients);//输出平面点的索引和参数
// Extract the planar inliers from the input cloud
pcl::ExtractIndices<pcl::PointXYZ> extract;//实例化一个提取对象
extract.setInputCloud(cloud_filtered);//设置要提取的点云
extract.setIndices(inliers);//根据分割得到的平面的索引提取平面
extract.setNegative(false);//提取内点
// Write the planar inliers to disk
extract.filter(*cloud_plane);//保存提取到的平面
//std::cout << "PointCloud representing the planar component: " << cloud_plane->points.size() << " data points." << std::endl;
//存写指针的参数
cloud_plane->width = cloud_plane->points.size();
cloud_plane->height = 1;
cloud_plane->resize(cloud_plane->width);
cloud_plane->is_dense = false;
ccPointCloud* newPointCloud = new ccPointCloud(QString::number(i + 1) + ".1segment");
for (int i = 0; i < cloud_plane->size(); ++i)
{
double x = cloud_plane->points[i].x;
double y = cloud_plane->points[i].y;
double z = cloud_plane->points[i].z;
newPointCloud->addPoint(CCVector3(x, y, z));
}
newPointCloud->setRGBColor(ccColor::Rgba(255, 100, 100, 255));
newPointCloud->setRGBColor(ccColor::Rgba(rand() % 205 + 50, rand() % 155 + 100, rand() % 105 + 150, 255));
newPointCloud->showColors(true);
CloudGroup->addChild(newPointCloud);
//CloudGroup->getLastChild()->setEnabled(false);
addToDB(newPointCloud);
//计数变量加1
i++;
// Remove the planar inliers, extract the rest
extract.setNegative(true);//提取外点(除第一个平面之外的点)
extract.filter(*cloud_f);//保存除平面之外的剩余点
cloud_filtered = cloud_f;//将剩余点作为下一次分割、提取的平面的输入点云
}
// Creating the KdTree object for the search method of the extraction
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud_filtered);//将无法提取平面的点云作为cloud_filtered
std::vector<pcl::PointIndices> cluster_indices;//保存每一种聚类,每一种聚类下还有具体的聚类的点
pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec;//实例化一个欧式聚类提取对象
ec.setClusterTolerance(0.02); // 近邻搜索的搜索半径为2cm,重要参数
ec.setMinClusterSize(100);//设置一个聚类需要的最少点数目为100
ec.setMaxClusterSize(25000);//一个聚类最大点数目为25000
ec.setSearchMethod(tree);//设置点云的搜索机制
ec.setInputCloud(cloud_filtered);//设置输入点云
ec.extract(cluster_indices);//将聚类结果保存至cluster_indices中
//迭代访问点云索引cluster_indices,直到分割出所有聚类,一个循环提取出一类点云
int j = 0;
for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin(); it != cluster_indices.end(); ++it)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_cluster(new pcl::PointCloud<pcl::PointXYZ>);
//创建新的点云数据集cloud_cluster,直到分割出所有聚类
for (std::vector<int>::const_iterator pit = it->indices.begin(); pit != it->indices.end(); pit++)
cloud_cluster->points.push_back(cloud_filtered->points[*pit]); //*
cloud_cluster->width = cloud_cluster->points.size();
cloud_cluster->height = 1;
cloud_cluster->is_dense = true;
ccPointCloud* newPointCloud = new ccPointCloud(QString::number(i + 1) + ".2segment");
for (int i = 0; i < cloud_cluster->size(); ++i)
{
double x = cloud_cluster->points[i].x;
double y = cloud_cluster->points[i].y;
double z = cloud_cluster->points[i].z;
newPointCloud->addPoint(CCVector3(x, y, z));
}
newPointCloud->setRGBColor(ccColor::Rgba(255, 255, 255, 255));
newPointCloud->showColors(true);
CloudGroup->addChild(newPointCloud);
CloudGroup->getLastChild()->setEnabled(false);
addToDB(newPointCloud);
j++;
}
m_ccRoot->addElement(CloudGroup);
}
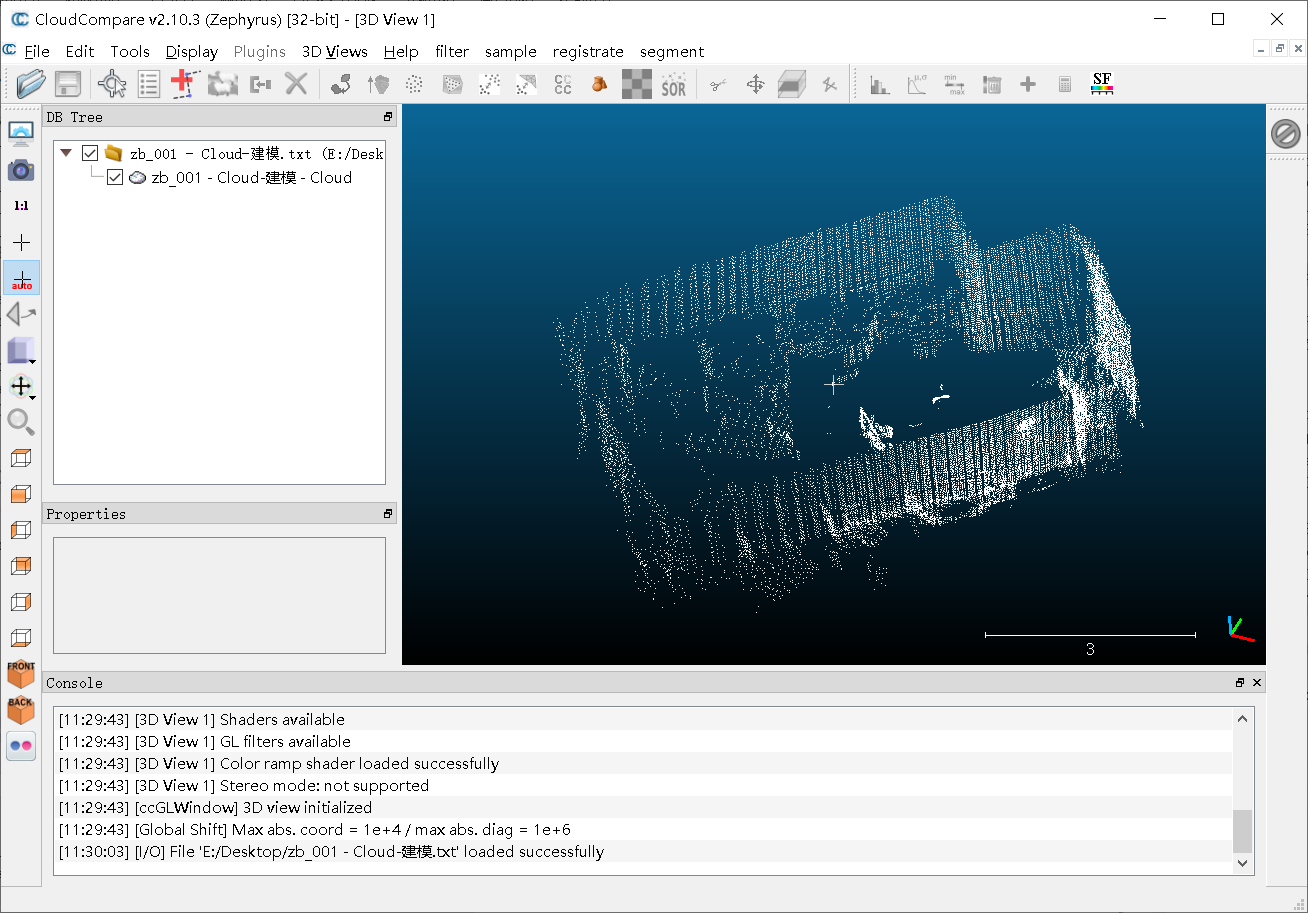
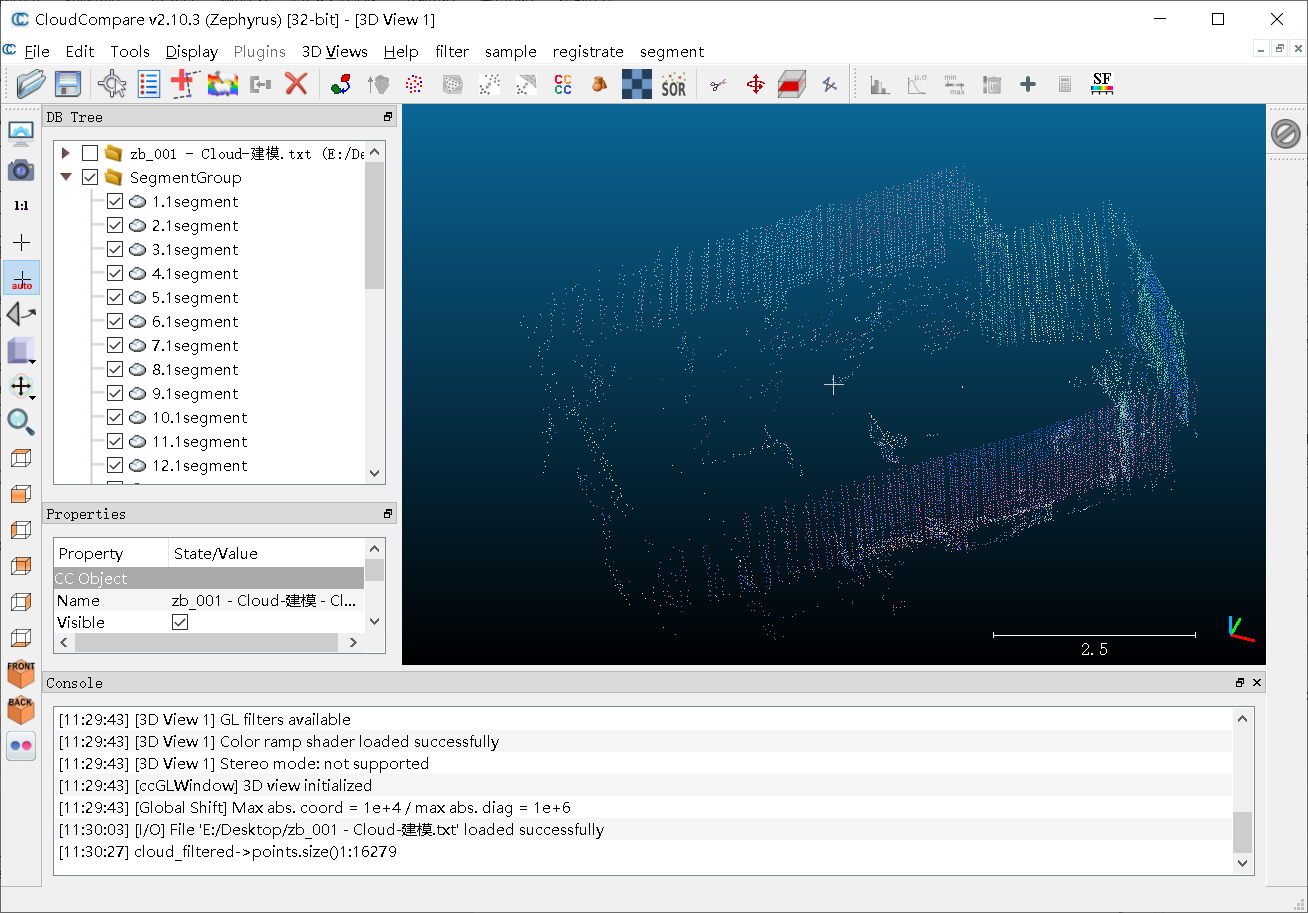
(2)分割结果
①分割前
②分割后
3.基于区域生长的分割(Region_Seg)
(1)实现代码
//基于区域生长的分割
void MainWindow::doActionPCLRegion_Seg()
{
if (getSelectedEntities().size() != 1)
{
ccLog::Print(QStringLiteral("只能选择一个点云实体"));
return;
}
ccHObject* entity = getSelectedEntities()[0];
ccPointCloud* ccCloud = ccHObjectCaster::ToPointCloud(entity);
// ---------------------------读取数据到PCL----------------------------------
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
cloud->resize(ccCloud->size());
pcl::PointCloud<pcl::PointNormal>::Ptr incloud(new pcl::PointCloud <pcl::PointNormal>());
for (int i = 0; i < cloud->size(); ++i)
{
const CCVector3* point = ccCloud->getPoint(i);
cloud->points[i].x = point->x;
cloud->points[i].y = point->y;
cloud->points[i].z = point->z;
pcl::PointNormal pt;
pt.x = point->x;
pt.y = point->y;
pt.z = point->z;
incloud->points.push_back(pt);
}
int KN_normal = 50; //设置默认输入参数
bool Bool_Cuting = false;//设置默认输入参数
float far_cuting = 10, near_cuting = 0, SmoothnessThreshold = 30.0, CurvatureThreshold = 0.05;//设置默认输入参数
pcl::search::Search<pcl::PointXYZ>::Ptr tree = boost::shared_ptr<pcl::search::Search<pcl::PointXYZ> >(new pcl::search::KdTree<pcl::PointXYZ>);//创建一个指向kd树搜索对象的共享指针
pcl::PointCloud <pcl::Normal>::Ptr normals(new pcl::PointCloud <pcl::Normal>);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> normal_estimator;//创建法线估计对象
normal_estimator.setSearchMethod(tree);//设置搜索方法
normal_estimator.setInputCloud(cloud);//设置法线估计对象输入点集
normal_estimator.setKSearch(KN_normal);// 设置用于法向量估计的k近邻数目
normal_estimator.compute(*normals);//计算并输出法向量
// 区域生长算法的5个参数
pcl::RegionGrowing<pcl::PointXYZ, pcl::Normal> reg;//创建区域生长分割对象
reg.setMinClusterSize(50);//设置一个聚类需要的最小点数
reg.setMaxClusterSize(1000000);//设置一个聚类需要的最大点数
reg.setSearchMethod(tree);//设置搜索方法
reg.setNumberOfNeighbours(30);//设置搜索的临近点数目
reg.setInputCloud(cloud);//设置输入点云
reg.setInputNormals(normals);//设置输入点云的法向量
reg.setSmoothnessThreshold(SmoothnessThreshold / 180.0 * M_PI);//设置平滑阈值
reg.setCurvatureThreshold(CurvatureThreshold);//设置曲率阈值
std::vector <pcl::PointIndices> clusters;//保存每一种聚类,每一种聚类下面还有具体的点
reg.extract(clusters);//获取聚类的结果,分割结果保存在点云索引的向量中。
//创建一个文件夹来放点云
ccHObject* CloudGroup = new ccHObject(QString("SegmentGroup"));
for (size_t i = 0; i < clusters.size(); i++)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_seg1(new pcl::PointCloud<pcl::PointXYZ>);
for (std::vector<int>::const_iterator pit = clusters[i].indices.begin(); pit != clusters[i].indices.end(); pit++)//创建一个迭代器pit以访问第一个聚类的每一个点
{
cloud_seg1->points.push_back(cloud->points[*pit]);//迭代器pit类似于一个指针,将第一个聚类分割中的每一个点进行强制类型转换,并放置在points中
}
cloud_seg1->width = cloud_seg1->points.size();
cloud_seg1->height = 1;
cloud_seg1->is_dense = false;
ccPointCloud* newPointCloud = new ccPointCloud(QString::number(i + 1) + ".Region_Seg");
for (int i = 0; i < cloud_seg1->size(); ++i)
{
double x = cloud_seg1->points[i].x;
double y = cloud_seg1->points[i].y;
double z = cloud_seg1->points[i].z;
newPointCloud->addPoint(CCVector3(x, y, z));
}
//newPointCloud->setRGBColor(ccColor::Rgba(100, 255, 100, 255));
newPointCloud->setRGBColor(ccColor::Rgba(rand() % 105 + 150, rand() % 155 + 100, rand() % 205 + 50, 255));
newPointCloud->showColors(true);
CloudGroup->addChild(newPointCloud);
//CloudGroup->getLastChild()->setEnabled(false);
addToDB(newPointCloud);
}
m_ccRoot->addElement(CloudGroup);
}
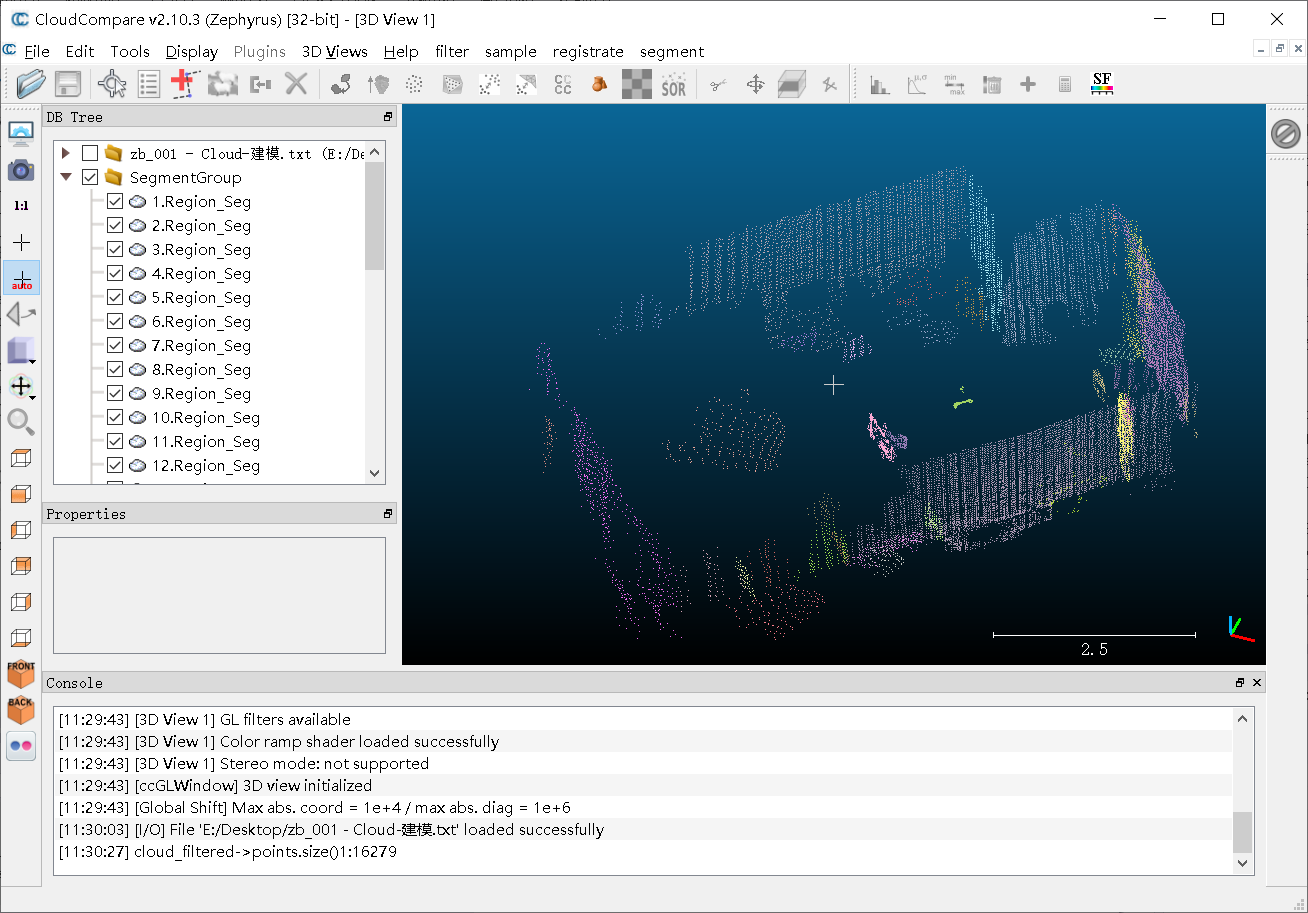
(2)分割结果
①分割前

②分割后
参考资料:
[1] 来吧!我在未来等你!. CloudCompare二次开发之如何配置PCL点云库?; 2023-05-15 [accessed 2023-05-17].
[2] Tech沉思录. PCL 【点云分割】; 2019-08-17 [accessed 2023-05-17].
[3] 步子小不扯淡. PCL: Segmentation模块之SACSegmentation点云分割; 2014-09-07 [accessed 2023-05-17].
[4] SOC罗三炮. PCL教程-点云分割之区域生长分割算法; 2023-01-08 [accessed 2023-05-17].
[5] 悠缘之空. PCL函数库摘要——点云分割; 2021-11-07 [accessed 2023-05-17].
智能推荐
从零开始搭建Hadoop_创建一个hadoop项目-程序员宅基地
文章浏览阅读331次。第一部分:准备工作1 安装虚拟机2 安装centos73 安装JDK以上三步是准备工作,至此已经完成一台已安装JDK的主机第二部分:准备3台虚拟机以下所有工作最好都在root权限下操作1 克隆上面已经有一台虚拟机了,现在对master进行克隆,克隆出另外2台子机;1.1 进行克隆21.2 下一步1.3 下一步1.4 下一步1.5 根据子机需要,命名和安装路径1.6 ..._创建一个hadoop项目
心脏滴血漏洞HeartBleed CVE-2014-0160深入代码层面的分析_heartbleed代码分析-程序员宅基地
文章浏览阅读1.7k次。心脏滴血漏洞HeartBleed CVE-2014-0160 是由heartbeat功能引入的,本文从深入码层面的分析该漏洞产生的原因_heartbleed代码分析
java读取ofd文档内容_ofd电子文档内容分析工具(分析文档、签章和证书)-程序员宅基地
文章浏览阅读1.4k次。前言ofd是国家文档标准,其对标的文档格式是pdf。ofd文档是容器格式文件,ofd其实就是压缩包。将ofd文件后缀改为.zip,解压后可看到文件包含的内容。ofd文件分析工具下载:点我下载。ofd文件解压后,可以看到如下内容: 对于xml文件,可以用文本工具查看。但是对于印章文件(Seal.esl)、签名文件(SignedValue.dat)就无法查看其内容了。本人开发一款ofd内容查看器,..._signedvalue.dat
基于FPGA的数据采集系统(一)_基于fpga的信息采集-程序员宅基地
文章浏览阅读1.8w次,点赞29次,收藏313次。整体系统设计本设计主要是对ADC和DAC的使用,主要实现功能流程为:首先通过串口向FPGA发送控制信号,控制DAC芯片tlv5618进行DA装换,转换的数据存在ROM中,转换开始时读取ROM中数据进行读取转换。其次用按键控制adc128s052进行模数转换100次,模数转换数据存储到FIFO中,再从FIFO中读取数据通过串口输出显示在pc上。其整体系统框图如下:图1:FPGA数据采集系统框图从图中可以看出,该系统主要包括9个模块:串口接收模块、按键消抖模块、按键控制模块、ROM模块、D.._基于fpga的信息采集
微服务 spring cloud zuul com.netflix.zuul.exception.ZuulException GENERAL-程序员宅基地
文章浏览阅读2.5w次。1.背景错误信息:-- [http-nio-9904-exec-5] o.s.c.n.z.filters.post.SendErrorFilter : Error during filteringcom.netflix.zuul.exception.ZuulException: Forwarding error at org.springframework.cloud..._com.netflix.zuul.exception.zuulexception
邻接矩阵-建立图-程序员宅基地
文章浏览阅读358次。1.介绍图的相关概念 图是由顶点的有穷非空集和一个描述顶点之间关系-边(或者弧)的集合组成。通常,图中的数据元素被称为顶点,顶点间的关系用边表示,图通常用字母G表示,图的顶点通常用字母V表示,所以图可以定义为: G=(V,E)其中,V(G)是图中顶点的有穷非空集合,E(G)是V(G)中顶点的边的有穷集合1.1 无向图:图中任意两个顶点构成的边是没有方向的1.2 有向图:图中..._给定一个邻接矩阵未必能够造出一个图
随便推点
MDT2012部署系列之11 WDS安装与配置-程序员宅基地
文章浏览阅读321次。(十二)、WDS服务器安装通过前面的测试我们会发现,每次安装的时候需要加域光盘映像,这是一个比较麻烦的事情,试想一个上万个的公司,你天天带着一个光盘与光驱去给别人装系统,这将是一个多么痛苦的事情啊,有什么方法可以解决这个问题了?答案是肯定的,下面我们就来简单说一下。WDS服务器,它是Windows自带的一个免费的基于系统本身角色的一个功能,它主要提供一种简单、安全的通过网络快速、远程将Window..._doc server2012上通过wds+mdt无人值守部署win11系统.doc
python--xlrd/xlwt/xlutils_xlutils模块可以读xlsx吗-程序员宅基地
文章浏览阅读219次。python–xlrd/xlwt/xlutilsxlrd只能读取,不能改,支持 xlsx和xls 格式xlwt只能改,不能读xlwt只能保存为.xls格式xlutils能将xlrd.Book转为xlwt.Workbook,从而得以在现有xls的基础上修改数据,并创建一个新的xls,实现修改xlrd打开文件import xlrdexcel=xlrd.open_workbook('E:/test.xlsx') 返回值为xlrd.book.Book对象,不能修改获取sheett_xlutils模块可以读xlsx吗
关于新版本selenium定位元素报错:‘WebDriver‘ object has no attribute ‘find_element_by_id‘等问题_unresolved attribute reference 'find_element_by_id-程序员宅基地
文章浏览阅读8.2w次,点赞267次,收藏656次。运行Selenium出现'WebDriver' object has no attribute 'find_element_by_id'或AttributeError: 'WebDriver' object has no attribute 'find_element_by_xpath'等定位元素代码错误,是因为selenium更新到了新的版本,以前的一些语法经过改动。..............._unresolved attribute reference 'find_element_by_id' for class 'webdriver
DOM对象转换成jQuery对象转换与子页面获取父页面DOM对象-程序员宅基地
文章浏览阅读198次。一:模态窗口//父页面JSwindow.showModalDialog(ifrmehref, window, 'dialogWidth:550px;dialogHeight:150px;help:no;resizable:no;status:no');//子页面获取父页面DOM对象//window.showModalDialog的DOM对象var v=parentWin..._jquery获取父window下的dom对象
什么是算法?-程序员宅基地
文章浏览阅读1.7w次,点赞15次,收藏129次。算法(algorithm)是解决一系列问题的清晰指令,也就是,能对一定规范的输入,在有限的时间内获得所要求的输出。 简单来说,算法就是解决一个问题的具体方法和步骤。算法是程序的灵 魂。二、算法的特征1.可行性 算法中执行的任何计算步骤都可以分解为基本可执行的操作步,即每个计算步都可以在有限时间里完成(也称之为有效性) 算法的每一步都要有确切的意义,不能有二义性。例如“增加x的值”,并没有说增加多少,计算机就无法执行明确的运算。 _算法
【网络安全】网络安全的标准和规范_网络安全标准规范-程序员宅基地
文章浏览阅读1.5k次,点赞18次,收藏26次。网络安全的标准和规范是网络安全领域的重要组成部分。它们为网络安全提供了技术依据,规定了网络安全的技术要求和操作方式,帮助我们构建安全的网络环境。下面,我们将详细介绍一些主要的网络安全标准和规范,以及它们在实际操作中的应用。_网络安全标准规范